Suis Had Goyangan Gegelung Hujung Plastik

-

Perumahan lasak
-

Tindakan yang Boleh Dipercayai
-

Kehidupan yang Dipertingkatkan
Penerangan Produk
Suis had mini siri RL8 Renew menawarkan ketahanan dan rintangan yang dipertingkatkan terhadap persekitaran yang keras, dengan jangka hayat mekanikal sehingga 10 juta operasi. Ini menjadikannya sesuai untuk aplikasi kritikal dan tugas berat di mana suis asas standard tidak mencukupi. Dengan rod spring fleksibel, suis had goyangan gegelung boleh dikendalikan dalam pelbagai arah (kecuali arah paksi), menampung ketidaksejajaran. Ia sangat sesuai untuk mengesan objek yang menghampiri dari pelbagai sudut. Hujung plastik dan hujung dawai tersedia untuk pelbagai aplikasi.
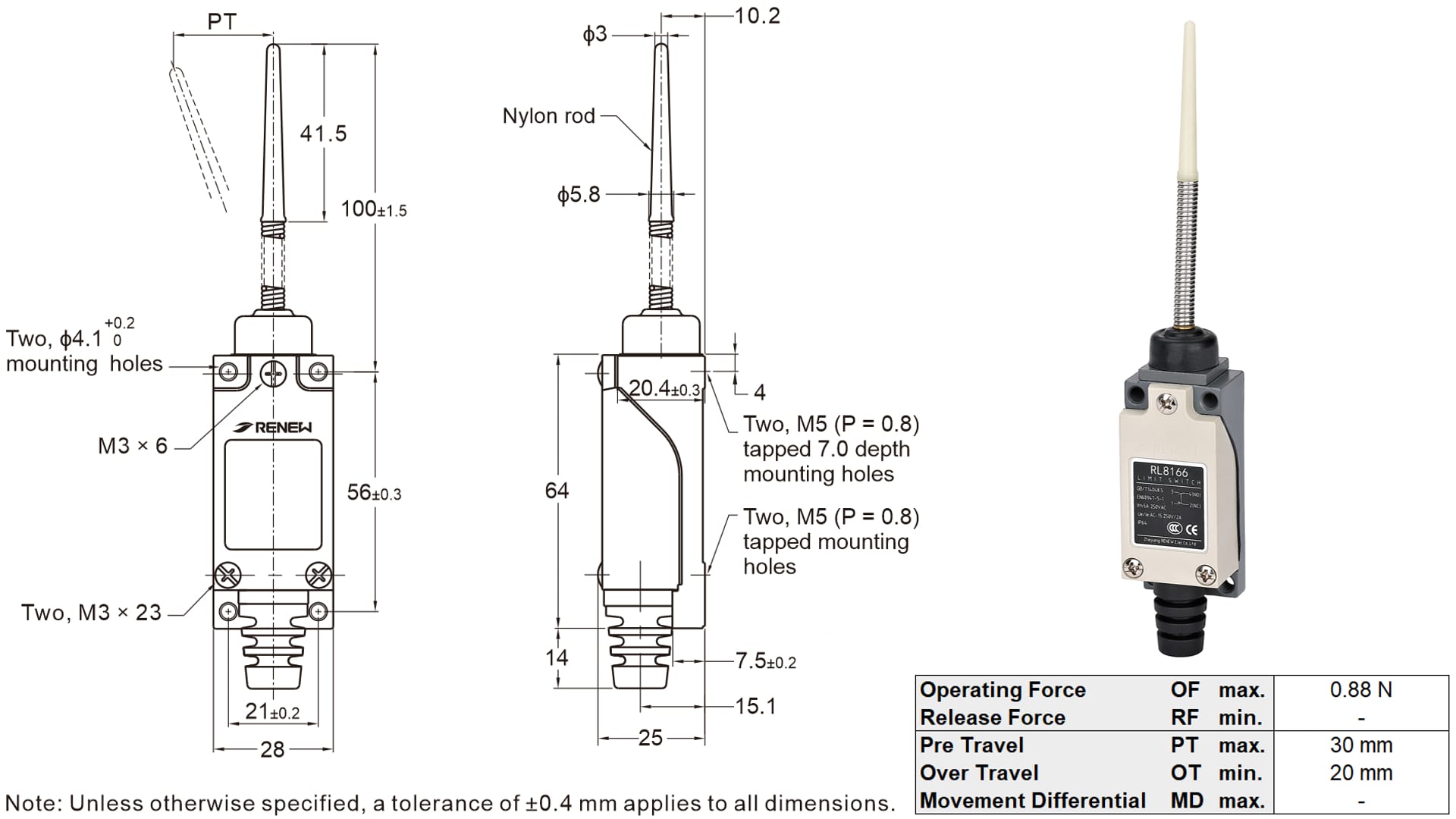
Dimensi dan Ciri-ciri Operasi
Data Teknikal Umum
| Penilaian ampere | 5 A, 250 VAC |
| Rintangan penebat | 100 MΩ min. (pada 500 VDC) |
| Rintangan sentuhan | Maksimum 25 mΩ (nilai awal) |
| Kekuatan dielektrik | Antara sentuhan yang mempunyai kekutuban yang sama 1,000 VAC, 50/60 Hz selama 1 minit |
| Antara bahagian logam yang membawa arus dan pembumian, dan antara setiap terminal dan bahagian logam yang tidak membawa arus 2,000 VAC, 50/60 Hz selama 1 minit | |
| Rintangan getaran untuk kerosakan | 10 hingga 55 Hz, amplitud berganda 1.5 mm (kerosakan: maksimum 1 ms) |
| Kehidupan mekanikal | 10,000,000 operasi min. (120 operasi/min) |
| Hayat elektrik | 300,000 min operasi (di bawah beban rintangan yang dinilai) |
| Tahap perlindungan | Kegunaan umum: IP64 |
Permohonan
Suis had mini Renew memainkan peranan penting dalam memastikan keselamatan, ketepatan dan kebolehpercayaan pelbagai peranti merentasi pelbagai bidang. Berikut adalah beberapa aplikasi yang popular atau berpotensi.

Logistik dan proses gudang
Di gudang dan kilang moden, suis had ini boleh digunakan dalam jentera pembungkusan untuk mengesan bungkusan berbentuk tidak sekata yang bergerak di atas penghantar. Rod fleksibel membengkok mengikut bentuk bungkusan, mencetuskan suis. Ia juga boleh digunakan dalam robotik dan sistem automatik untuk mengesan kedudukan hujung lengan robot atau bahagian bergerak yang mungkin tidak sejajar dengan sempurna setiap masa.













